Autonomous Ground Vehicle – System ID, SLAM, RL, Target
This is one of ANM’s autonomous vehicles – a small car we use for research in system identification (top right), reinforcement learning, simultaneous localization and mapping. It’s shown autonomously driving to waypoints in bottom right.
Ground Vehicle GPS-D Lidar SLAM
In this project, we studied front end lidar SLAM using ANMs small autonomous CAR.
Path-Planning, Obstacle Avoidance, and Multi-Agent SLAM
We show the performance of the combination of several open-source libraries on obstacle avoidance and multi-agent problems.
Multi Agent Pose Graph Optimization
In this project we studied combining data from multiple agents to improve SLAM performance.
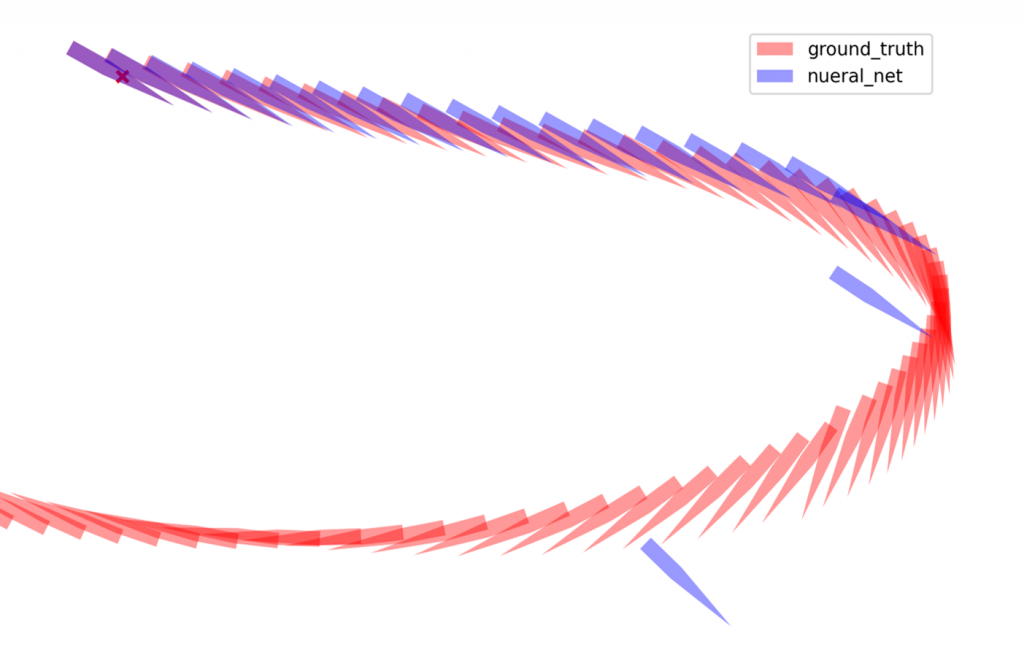
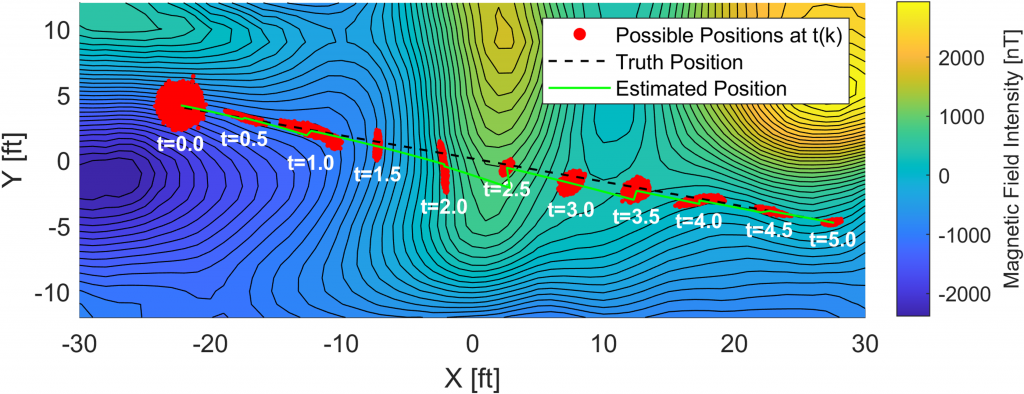
Magnetic Particle Filter
Here we mapped the actual magnetic field in the motion capture lab, and used that to design a particle filter to help autonomous agents localize.
Neuro Grid – Ground Truth Map
Neuro Grid was a neuromorphic localization project. Top right shows boxes used to build terrain features. Top left shows drone and sensors. Bottom left shows a digitized map of the boxes and the path a drone would fly over the boxes. Bottom right shows depth data captured during flight.