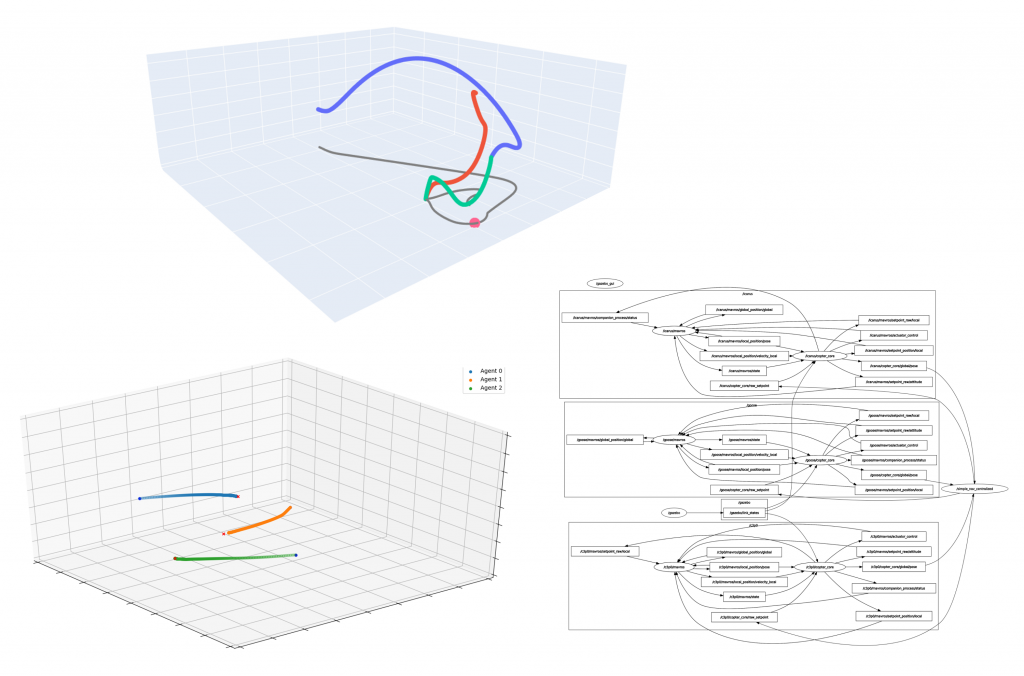
Multi Agent Neural Control towards RL testbed
The left shows our python simulations of reinforcement learning (top) and supervised learning (bottom) for multi agent control. The middle shows a multi agent communication graph in ROS. The right shows mid fidelity simulations in gazebo/rviz.
Multi Agent Hardware System
Here we see five drones flying in coordination using our multi agent control system. This system was also used for distributed vision research using the MNIST digits on the floor.
Simulation
This was a multi agent targeting project. This slide shows initial work in Gazebo simulation. Agent 1 goes down mid flight, so Agents 2 and 3 reassign to the highest priority targets.
Hardware
This video shows the results on hardware (sped up 16x).
Motion Capture
This slide shows the motion capture view of the same experiment.
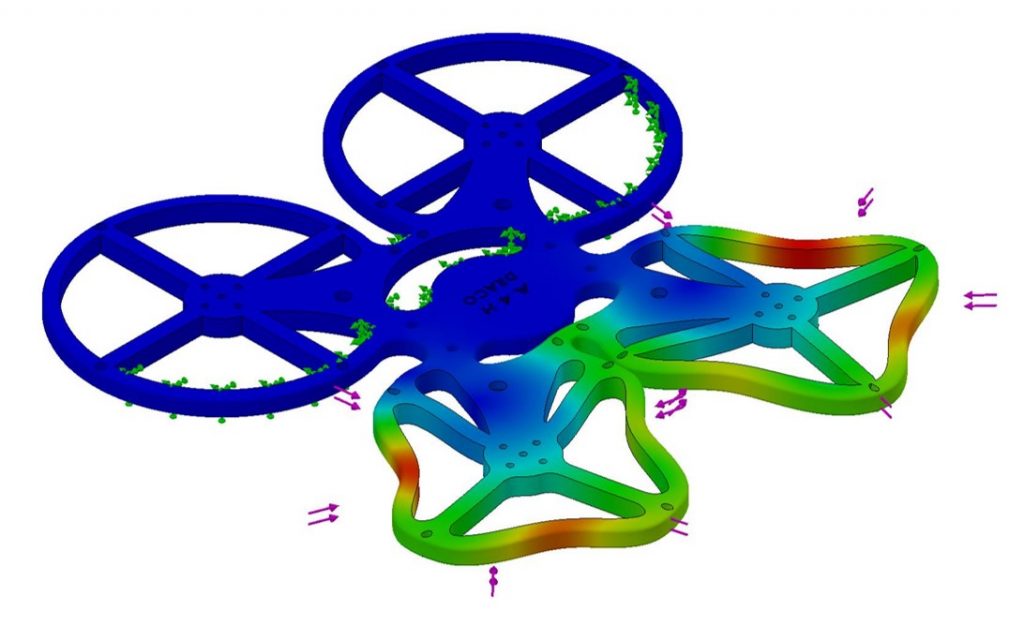
Scalable Multi Agent Hardware
This is a custom drone we built to study smaller vehicles for use in multi agent settings.
Crazyflies
We eventually moved to COTS multi agent drones – the Crazyflies. The left shows our simulation environment. The right shows five drones flying to their targets, which are sensed in real time.
Crazyflies – Model Predictive Control
We also implemented Model Predictive Control for 16 crazyflies in simulation (left), though we only tested on 1 in hardware (right).
Autonomous Path Planning for Drones
This video demonstrates the capabilities of dual-mode path-planning. We implement both a control barrier function to ensure safety and an A* planner which ensures optimal mission success.
Multi-Agent RL Pursuit-Evasion Task
This video demonstrates multi-agent reinforcement learning to the pursuit-evasion task. In this task, a team of evaders aims to cause a collision between the pursuer agents while simultaneously reaching a designated goal location.
Multi-Agent Autonomous Drone Formations with Crazyflies
This video showcases control barrier functions enabling autonomous drone light shows. Each drone navigates to its assigned position in the formation while avoiding collisions. The drones form basic shapes, spell out SANDIA, and display the iconic Sandia Thunderbird, changing colors with each new formation.