This is a simulation environment we use for autonomous robotic inspection research.
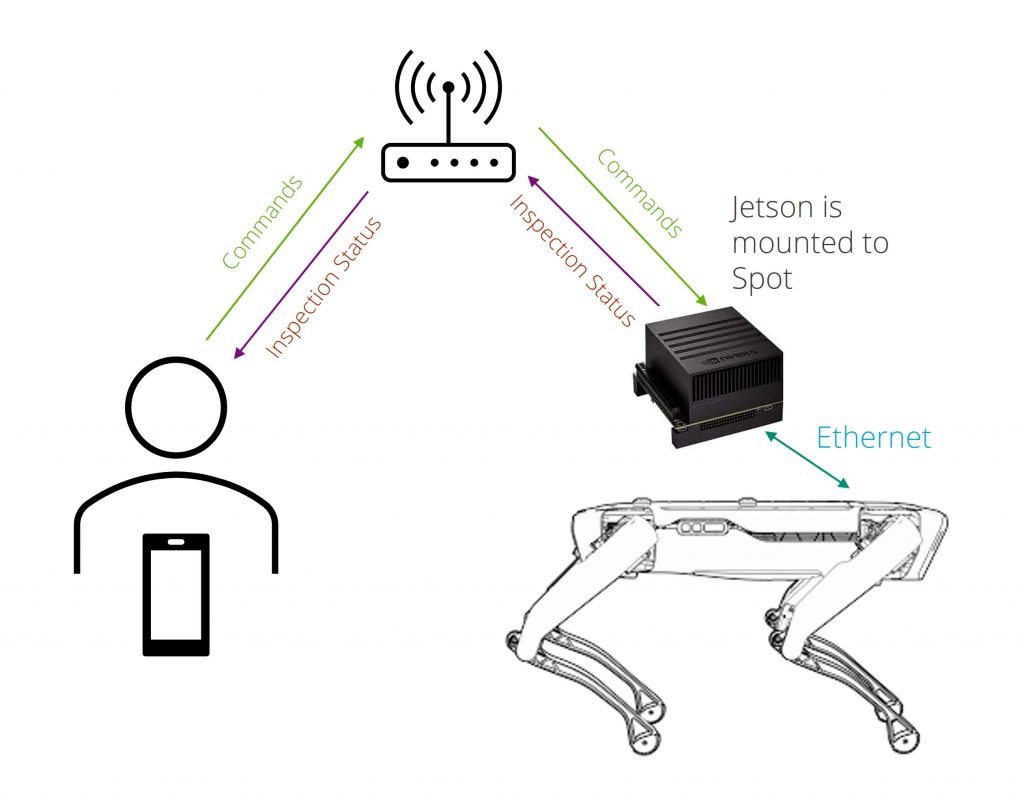
The left shows Spot with microphone, speaker, wireless, GPU and prototype push button interface. The right shows communication between an inspector and Spot.
This video shows a prototype YOLOv5 object detection system implemented to give Spot more situational awareness and enable autonomous operations.
The left shows simulated training data (Limbo) the right shows test time performance on real data.
We’ve also been exploring instance segmentation as a way to provide Inspecta with richer contextual awareness. Model is SAM from meta. Photo is from Limbo.
This video shows the process for generating a pseudo-optimal trajectory for aerial robotic inspection of a 3D model.